任意の局所座標系は、まず基本とする3次元の世界座標系がアプリオリに存在しているとして、それを使って種々の座標系を再定義します。この節の説明は第2.3節の説明と重複しますが、あえて再掲します。座標系は、互いに直交する右手座標系の向きを指示する三つの単位ベクトルa、b、c、原点の位置を示す位置ベクトルd、の四つのベクトルの一組(a,b,c,d)で表します。これを代数的にまとめて扱うときには、これらのベクトルを列の要素とした3×4の行列(matrix)にまとめますFORTRAN言語では、この2次元配列の定義を成分数12の1次元配列で扱うこともできますし、最初の9成分を3×3の行列(a、b、c)、残りを3次のベクトルdとしても扱うことができます。コンピュータの記憶領域の管理では、前者を成分数12の1次元配列で扱います。幾何学的な意義を考えるときには後者の方で扱います。行列そのものは代数的な演算を便利にする数学量ですが、幾何学的な意味付けを踏まえて、行列成分の並べ方に約束を決めておくことは大切です。
図3.5 座標系の定義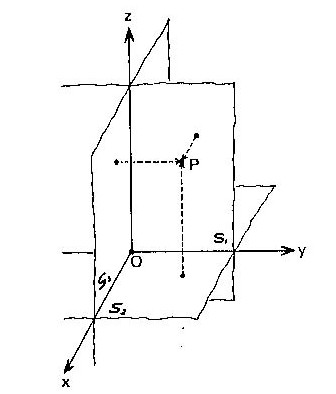
多面体の幾何モデル自身の局所座標系は、最初、世界座標系のコピーが当てられます。その成分は(1,0,0, 0,1,0, 0,0,1, 0,0,0)です。モデルを移動・回転などの変換をさせるとき、普通はこの局所座標系も一緒に変換させます。局所座標系をそのままにしてモデルだけを変換する場合もありますし、モデルの軸や重心を考えて局所座標系だけを付け替えることも必要になります。しかし、モデルを拡大・縮小などの変形をさせるときは、局所座標系を変形させることをしません。変換の数学的な処理方法にはかなり長い解説が必要になりますので、この部分は第4章「幾何で扱う変換行列」にまとめました。
次のページ