4.5丂夞揮傪梌偊傞曄姺峴楍偺夝愅
慜偺儁乕僕丟
師偺儁乕僕
丂戞4.3愡偱偼丄棫懱恾宍傪曄宍偝偣側偄偱丄椡妛偱偄偆崉懱偺夞揮傪埖偆俁亊俁峴楍偺媮傔曽傪愢柧偟傑偟偨丅偙偺愡偼丄4.3愡偺媡栤戣傪埖偄傑偡丅偮傑傝丄俁亊俁峴楍偑梌偊傜傟偨偲偟偰丄偙偺夞揮幉偺曽岦丄夞揮妏搙偍傛傃夞揮幉偑捠傞埵抲傪媮傔傞偙偲偱偡丅偙偺寁嶼偵偍偄偰埖偆偙偲偑偱偒傞峴楍偼丄峴楍偺梫慺偵偮偄偰丄偄偔偮偐偺忦審傪枮懌偟偰偄側偗傟偽側傝傑偣傫丅嵟弶偵偙偺忦審傪嬦枴偟丄偮偄偱丄夞揮幉偲夞揮妏搙傪媮傔傞幃傪愢柧偟傑偡丅
4.5.1丂夞揮傪梌偊傞曄姺峴楍偺忦審
丂恾宍偺曄姺傪昞偡堦斒揑側娭學幃偼丄偡偱偵幃(4.3) 偱愢柧偟偨傛偆偵q=Tp+d偺宍偱偡丅夞揮傪峴傢偣傞俁亊俁偺峴楍T偺梫慺傪丄壓偺傛偆偵嶰偮偺廲儀僋僩儖偺梫慺偱昞偡偙偲偵偟傑偡丅
峴楍T偑崉懱夞揮傪偝偣傞曄姺峴楍偱偁傞忦審偼丄儀僋僩儖(a,b,c)偑丄塃庤宯偺屳偄偵捈岎偡傞扨埵儀僋僩儖偱側偗傟偽側傜側偄偙偲偱偡丅幃偱帵偡偲師偺忦審偱偡丅
峴楍T偼丄幃(4.35) 偵帵偟偨傛偆偵俋屄偺梫慺偑偁傝傑偡丅偟偐偟丄梫慺摨巑偼幃
(4.36)乣(4.38) 偺忦審傪枮偨偝側偗傟偽側傝傑偣傫偐傜丄梫慺偺抣傪寛掕偡傞帺桼搙偼俁屄偟偐巆傝傑偣傫丅忋偺忦審偑枮偨偝傟傑偡偲丄T偺媡峴楍T-1偼揮抲峴楍Tt偵摍偟偔側傝傑偡丅傑偨丄媡峴楍偼丄婔壗妛揑偵偄偊偽丄夞揮傪尦偵栠偡曄姺偱偡偺偱丄尦偺峴楍偺揮抲峴楍偵偮偄偰傕丄幃(4.36)乣
(4.38)偲摨偠忦審偑惉傝棫偪傑偡丅偙偺忦審傪枮偨偟偨俁亊俁峴楍傪夞揮峴楍偲屇傇偙偲偵偟傑偡丅
4.5.2 夞揮幉偺曽岦偲夞揮妏傪媮傔傞偙偲
丂俁亊俁偺峴楍T偑夞揮峴楍偱偁傞偲偒丄堦偮偺幉傪寛傔偰丄偨偩堦夞偺夞揮憖嶌偱強朷偺夞揮傪幚尰偝偣傞偙偲偑偱偒傑偡丅偦偺偲偒偺夞揮幉偺曽岦傪扨埵儀僋僩儖u=(u1,u2,u3)丄夞揮妏傪偦偺儀僋僩儖曽岦偵塃夞傝偵兤偲偡傞偲丄峴楍T偼丄幃(4.22)
偱昞偡偙偲偑偱偒傑偡丅愢柧偺偨傔丄偦偺幃傪嵞宖偟傑偡丅

丂幃(4.22) 偺峴楍偼丄僷儔儊乕僞偲偟偰(u1,u2,u3,兤)偺係屄偑巊傢傟偰偄傑偡偑丄u偑扨埵儀僋僩儖偱偁傞忦審偑1屄昁梫偱偡丅幃(4.22)偺塃曈偺媡懳徧偺惉暘偑丄夞揮傪梌偊傞峴楍偺摿挜偱偡偺偱丄偙偺梫慺偵拲栚偡傟偽丄儀僋僩儖u偺惉暘傪媮傔傞偙偲偑偱偒傑偡丅偡側傢偪丄
儀僋僩儖u偑扨埵儀僋僩儖偱偡偺偱丄u丒u=1 偺忦審傪枮偨偡傛偆偵偡傞偙偲偱丄sin兤偺抣傪媮傔傞偙偲偑偱偒傑偡丅
丂側偍丄幃(4.39) 偵偍偄偰丄儀僋僩儖u偺岦偒傪媡偵掕媊偡傞偲丄兤偺晞崋傕斀揮偟傑偡丅cos兤偺抣傪媮傔傞偵偼丄傑偢丄幃(4.35) 偲幃(4.22)偺峴楍偐傜丄懳妏慄梫慺偩偗偵拲栚偟傑偡丅

sin兤偲cos兤偲偑媮傑傟偽丄兤傪妋掕偱偒傑偡丅
丂傕偟峴楍T偺旕懳徧惉暘偑偡傋偰0偱偁傟偽丄兤偑0搙傑偨偼180搙偺偳偪傜偐偱偁傝丄峴楍T偺懳妏慄梫慺偑1傑偨偼-1偺偳偪傜偐偵側傝傑偡丅偙偺偲偒偼丄慡偔夞揮傪偟側偄偐丄嵗昗幉夞傝偵180搙偺夞揮傪偡傞偲偒偵摉偨傝傑偡丅偙偺偲偒偼丄幃
(4.39) 丄(4.40)丄 偱偼側偔峴楍T偺懳徧惉暘傪巊偭偨壓偺幃傪嶲峫偵偟偰媮傔傑偡丅
晅榐俠偵偼丄僒僀僐儘忬偺棫曽懱偺岦偒偑24捠傝帵偝傟偰偄傑偡偑丄偙傟偼嵗昗幉夞傝偺夞揮偑90搙偺攞悢偺応崌偺夞揮峴楍傪偡傋偰帵偟偨傕偺偱偡丅岦偒偺暘椶僐乕僪偱B3丄E3丄E1偑幃(4.42)偺忦審偵摉偨傝傑偡丅
4.5.3丂嵗昗幉夞傝偺夞揮妏搙傪媮傔傞偙偲
丂擟堄偺岦偒偵婔壗儌僨儖傪夞揮偝偣傞偲偒丄悽奅嵗昗宯偺x幉丄y幉丄z幉偺弴偵夞揮偝偣傞偺偑昗弨偺峫偊曽偵側偭偰偄傑偡丅偙偺寁嶼幃偼丄4.3.5愡偺幃(4.21)偵帵偟偰偁傝傑偡偑丄愢柧偺偨傔丄偙偺幃傪傕偆堦搙壓偵帵偟傑偡丅偙偙偱偺栤戣偼丄幃(4.35)偵帵偟偨峴楍偺梫慺偐傜丄嵗昗幉偛偲偺夞揮妏搙兛丄兝丄兞傪媮傔傞偙偲偱偡丅棟孅偺忋偱偼嵗昗幉偺弴斣偺寛傔曽偑俇捠傝偁傝傑偡丅偟偐偟丄嵗昗幉偺慖傃曽偼偐側傝湏堄揑偱偡偺偱丄夞揮偝偣傞幉偺弴彉偵壖偺x丄y丄z幉傪摉偰偼傔偰峫偊傞偙偲偑偱偒傑偡丅夞揮妏搙偺惓偺岦偒偺掕媊偑嵗昗幉偺岦偒偲崌傢側偗傟偽丄妏搙偺惓晧偺掕媊傪斀懳偵偡傟偽傛偄偺偱丄幃(4.21)偵婎偯偄偨夝愅曽朄偼懠偺応崌偵傕墳梡偱偒傑偡丅
丂夞揮妏搙兛丄兝丄兞傪媮傔傞偵偼丄戙悢揑偵枹抦悢偲忦審幃偲傪懳墳偝偣側偑傜丄偁傞掱搙偺榑棟揑側敾抐傪偡傞昁梫偑偁傝傑偡丅
(1) 傑偢丄幃(4.35) 偲幃(4.22)傪斾妑偡傟偽丄妏搙兝偵偮偄偰
僷儔儊乕僞Cy偼丄晧偺晞崋偺壜擻惈偑偁傝傑偡偑丄嵎摉偭偰Cy>0偲寛傔傑偡丅偙傟偼丄妏搙兝偺斖埻傪亇90搙(-兾/2丄兾/2)偺斖埻偲巜掕偡傞偙偲偱偡丅
(2) 傕偟傕|a3|=1 偱偁傟偽丄a1丄a2丄b3丄c3偑偡傋偰0偱偡丅偙偺偲偒偵偼丄師偺擇偮偺応崌偑偁傝傑偡丅
(2a) a3=1偺偲偒丄兝=-兾/2偱偡丅幃(4.21)偼丄壓偺傛偆偵娙棯壔偝傟傑偡丅
偡側傢偪丄梌偊傜傟偨峴楍偺梫慺偵丄師偺娭學偑昁梫偱偡丅

(2b) a3=-1偺偲偒丄兝=兾/2偱偡丅幃(4.21)偼丄壓偺傛偆偵側傝傑偡丅

擇偮偺働乕僗傪斾妑偡傞偲丄兛=0偲偍偔偙偲偱兝偺晞崋傪婥偵偟側偄偱嵪傒傑偡丅偮傑傝壓偺幃(4.45)偱丄妏搙兞傪媮傔傞偙偲偑偱偒傑偡丅
(3) |a3|<1 偱偁傞偲偒丄兝偼幃(4.43)偱媮傔傜傟傑偡丅妏搙兛偲兞偵偮偄偰丄師偺傛偆偵寛傑傝傑偡丅

4.5.4 夞揮偺拞怱傪媮傔傞偙偲
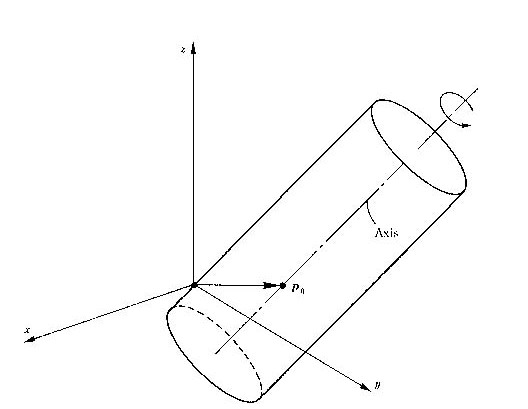
丂棫懱恾宍傪夞揮偝偣傞曄姺q=Tp+d偵偍偄偰丄夞揮幉偑尨揰傪捠傜側偄応崌偵暯峴堏摦偺儀僋僩儖惉暘d傪寛傔偰偍偔偙偲偑昁梫偱偡丅偙偺d偺媮傔曽偼丄4.2.8崁偱愢柧偟傑偟偨丅夞揮幉偑埵抲儀僋僩儖p0 傪捠傞偲偒丄d偲p0偺娭學傪丄幃(4.15)偱梌偊偰偁傝傑偡丅嵞宖偡傞偲壓幃偱偡丅

丂偙偺崁偱愢柧偟傛偆偲偟偰偄傞偺偼丄T偲d偐傜丄p0傪媮傔傛偆偲偄偆媡栤戣偱偡丅
恾 4.9丂夞揮幉偑捠傞埵抲
丂偄傑丄d=(E-T)p0偲彂偔偙偲偑偱偒傑偡偐傜丄(-T+E)偺媡峴楍偑媮傔傜傟傟偽d傪梌偊偰p0傪寁嶼偡傞偙偲偑偱偒傑偡丅偟偐偟丄E偲T偼丄4.3.6崁偺愢柧偱偼丄壓偵帵偡傛偆側擇崁愊偱昞偡偙偲偑偱偒傑偟偨丅

偟偨偑偭偰丄

偙偙偱丄(-T+E)偼丄儀僋僩儖u偺惉暘傪慡偔娷傑側偄偺偱丄惓懃偺峴楍偵側偭偰偄傑偣傫丅偮傑傝丄(-T+E)偺媡峴楍傪媮傔傞偙偲偑偱偒側偄偺偱偡丅幚偼丄偙偺偙偲偼摉慠梊憐偝傟傞偙偲側偺偱偡丅偦偺棟桼偼丄p0偑夞揮幉忋偵偁傟偽丄偦偺幉忋偺偳偙偵偁偭偰傕傛偄偐傜偱偡丅p0偑堦偮偺夝偱偁傟偽丄兩傪擟堄偵慖傫偩僗僇儔乕偲偟偰p0+兩u傕傑偨夝偵側傞偐傜偱偡丅幃(4.46)傪丄v偲w偲偺擇崁愊偺惉暘偱峴楍偵暲傋捈偟偨堦師宍幃偱帵偟傑偟傚偆丅

學悢偩偗傪庢傝弌偟偨俀師尦偺峴楍傪M偲偟傑偡丅
M偺媡峴楍M-1偼娙扨偵媮傔傜傟傑偡丅偦傟偼丄Mt傪M偺揮抲峴楍偲偟偰丄

偙偺娭學傪墳梡偡傞偙偲偱丄p0傪媮傔傞娭學幃傪壓偺傛偆偵摫偔偙偲偑偱偒傑偡丅

偙偺夝p0偵偼丄忋偱愢柧偟偨傛偆偵丄夞揮幉曽岦偺儀僋僩儖u偺惉暘傪帩偭偰偄傑偣傫丅
師偺儁乕僕