丂4.2愡偱丄棫懱恾宍傪奼戝傕偟偔偼弅彫偡傞曄姺傪埖偄傑偟偨丅偦偺4.2.7崁偱丄嶰偮偺捈岎偡傞曽岦偛偲偵攞棪偺堎側傞奼戝丒弅彫傪偝偣傞峴楍傪師偺傛偆偵梌偊傑偟偨丅

偨偩偟丄(u,v,w)偼丄屳偄偵捈岎偡傞嶰偮偺扨埵儀僋僩儖偱偡丅峴楍T偼丄忋偺掕媊偐傜柧傜偐側傛偆偵丄懳徧峴楍偱偡丅偙偺愡偼丄峴楍T偑梌偊傜傟偰丄儀僋僩儖(u,v,w)偲丄學悢兩1丄兩2丄兩3傪媮傔傞偙偲偱偁偭偰丄4.2.7崁偺媡栤戣傪埖偄傑偡丅偦偟偰丄偙偺栤戣偼丄慄宍栤戣偵偍偗傞屌桳抣夝愅偲屇偽傟傞傕偺偱偡丅偙偙偵丄(u,v,w)傪屌桳儀僋僩儖丄兩1丄兩2丄兩3傪屌桳抣偲尵偄傑偡丅屌桳抣栤戣偼丄4.6愡偱埖偭偨嵗昗曄姺偺寁嶼偱傕偁偭偰丄梌偊傜傟偨懳徧峴楍傪曄姺偟偰懳妏峴楍偵捈偡偙偲偱偡丅嵗昗宯傪峴楍TA=(u,v,w)偱梌偊傞偲丄屌桳抣偺寁嶼偼師偺傛偆偵側傝傑偡丅

丂懳徧側峴楍T偺梫慺傪丄壓偵帵偡傛偆側婰崋冃偲冄傪巊偭偰帵偟傑偡丅偙偺僊儕僔儍暥帤偺婰崋偼丄嵽椏椡妛偱偼墳椡傪昞偡傕偺偲偟偰丄忢幆揑偵巊傢傟偰偄傞曽朄偱偡丅

偨偩偟丄懳徧峴楍偺忦審偼丄冄21=冄12丄冄31=冄13丄冄32=冄23偱偡丅偁傞儀僋僩儖p=(x,y,z)偑屌桳儀僋僩儖偱偁傝丄偦偺偲偒偺屌桳抣偑冇偱偁傞忦審偲偼丄乽峴楍T偲儀僋僩儖p傪墘嶼偝偣偰摼傜傟傞儀僋僩儖偑丄p傪僗僇儔乕冇攞偟偨傕偺偵摍偟偄乿偲偄偆傕偺偱偡丅幃偵彂偔偲丄Tp=冇p丄偡側傢偪

偙傟傪戙悢幃偱彂偔偲丄

偙偺摨師楢棫曽掱幃偵偍偄偰丄x丄y丄z偺偡傋偰偑 0偱偼側偄夝偑懚嵼偡傞偨傔偺忦審偼丄學悢峴楍偺峴楍幃乮僨僞乕儈僫儞僩乯偑0偲側傞忦審傪枮偨偡冇傪媮傔傞偙偲偱偡丅偮傑傝丄

忋偺幃偼曄悢冇偺俁師幃偱偁傝丄戙悢妛偺栤戣偲偟偰埖偆偲偒偵偼丄嶰偮偺崻傪戝偒偄弴偵斣崋傪偮偗偰丄兩1丄兩2丄兩3偲偡傞廗姷偵側偭偰偄傑偡丅屌桳抣偵懏偡傞屌桳儀僋僩儖傪媮傔傞偵偼丄幃(4.67)偺夝偱摼傜傟偨屌桳抣偺堦偮傪丄幃(4.66) 偵戙擖偟偨楢棫曽掱幃偐傜媮傔傑偡丅偟偐偟丄婔壗偺栤戣偲偟偰屌桳抣偲屌桳儀僋僩儖傪媮傔傞偲偒偵偼丄屌桳抣偺暲傋曽偲儀僋僩儖偺岦偒偺掕媊偵偼拲堄偑昁梫偱偡丅偙傟偼師崁偱愢柧偟傑偡丅
丂堦斒揑側n師偺懳徧峴楍偺屌桳抣傪媮傔傞応崌偺婎慴揑側抦幆偲偟偰丄嵟傕扨弮側俀師尦偺懳徧峴楍偺屌桳抣夝愅傪愢柧偟傑偡丅俀師尦偺懳徧峴楍偼丄壓偵帵偡傛偆偵峫偊傑偡丅峴楍偺擇偮偺屌桳抣傪兩1丄兩2偲偟丄屌桳儀僋僩儖偼u=(u1,u2)丄v=(v1,v2)偲偟傑偡丅

擇偮偺屌桳儀僋僩儖u丄v偼丄偦傟偧傟扨埵儀僋僩儖偱偁偭偰丄屳偄偵捈岎偡傞偺偱丄妏搙兤傪僷儔儊乕僞偲偟偰丄x丄y嵗昗柺偺擇偮偺摦宎儀僋僩儖偲偡傞偙偲偑偱偒傑偡丅

偙傟傪戙擖偟偰惉暘偺娭學傪媮傔傑偡偲丄

偝傜偵丄嶰妏岞幃傪巊偭偰惍棟偡傞偲丄

丂偙偺傛偆偵幃偱彂偔偲丄幃偺堄枴傪棟夝偟擄偄偺偱丄偙傟傪俀師尦偺(冃丄冄)嵗昗宯傪巊偭偰昤偄偨傕偺偑恾(4.10)偱偡丅偙偺昞尰曽朄偼丄抏惈懱偺椡妛偱偼儌乕儖偺(Mohr' circle)偲屇偽傟丄俀師尦抏惈懱偺庡墳椡偺戝偒偝偲岦偒偲傪媮傔傞偲偒偺愢柧偵巊傢傟偰偄傑偡丅墌偺敿宎偼0.5(兩1-兩2)丄墌偺拞怱嵗昗偼丄冃幉忋偺0.5(兩1+兩2)偱偡丅曃妏兤偺俀攞傪僷儔儊乕僞偲偡傞摦宎偑丄偙偺墌偲岎傢傞嵗昗偑(冃1,冄)丄(冃2,-冄)偲側傝傑偡丅
恾4.10丂儌乕儖墌偵傛傞屌桳抣夝愅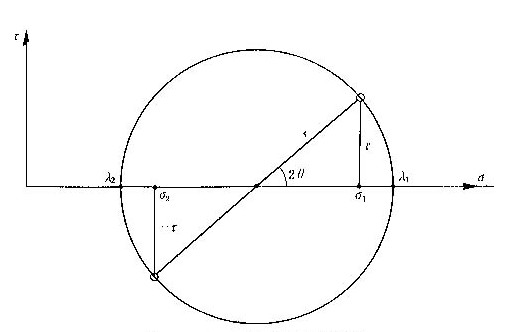
丂懳徧側俀亊俀偺峴楍偺屌桳抣栤戣偼丄忋偵弎傋偨幃偵懳偡傞媡栤戣偱偡丅偮傑傝(冃1,冃2,冄)偑 梌偊傜傟偰丄(兩1,兩2,兤) 傪媮傔傞偙偲偱偡丅恾4.10偲幃(4.70)偲偐傜丄墌偺敿宎偼丄

擇偮偺屌桳抣偼丄

曃妏兤傪媮傔傞幃偼丄

丂偙偙傑偱偺戙悢揑側愢柧偵偼丄屌桳抣偲屌桳儀僋僩儖偺寛傔曽偵丄偄偔傜偐濨枂側偲偙傠偑偁傝傑偡丅堦斒揑側栺懇偱偼丄傑偢丄恾4.10偱椺帵偟偨冃1>冃2偲偄偆忦審偼昁偢偟傕惉傝棫偪傑偣傫丅婔壗妛揑側惈幙傪峫偊傟偽丄擇偮偺庡幉曽岦傪帵偡儀僋僩儖(u,v)偺曽岦偼丄傕偲偺嵗昗幉偺扨埵儀僋僩儖(i,j)傪丄側傞傋偔彫偝側夞揮妏搙(-45亱<兤<45亱)偱夞揮偝偣偨偄偲峫偊傑偡丅偙傟偼丄幃(4.69)偱丄cos兤>0傪忦審偵寛傔傞偙偲偱偡丅寢嬊丄擇偮偺屌桳抣偺戝彫娭學傪師偺傛偆偵寛傔傑偡丅
丒傕偟(冃1>冃2)側傜偽(兩1>兩2)偲寛傔丄兤傪亄冃幉曽岦偐傜應傞
丒傕偟(冃1<冃2)側傜偽(兩1<兩2)偲寛傔丄兤傪-冃幉曽岦偐傜應傞
丒 兤偺晞崋偼丄冄(冃1-冃2)偺晞崋偵崌傢偣傞
丂4.7.2崁偱愢柧偟偨俀師偺懳徧峴楍偺屌桳抣夝愅偺曽朄傪孞傝曉偟偰丄堦斒偺n師偺懳徧峴楍偺応崌偵奼挘偟偨曽朄偑丄Jacobi朄偲屇偽傟傞悢抣夝愅偺曽朄偱偡丅n師偺峴楍偺応崌偵偼丄壖憐偺n師尦嬻娫傪峫偊丄偦偙偵屳偄偵捈岎偡傞n屄偺扨埵儀僋僩儖傪峫偊傑偡丅偙偺扨埵儀僋僩儖傪楍乮廲乯儀僋僩儖偲偡傞峴楍傪A偺婰崋偱昞偡偙偲偵偟傑偡丅

丂梌偊傜傟偨尦偺懳徧峴楍傪T偲偟傑偡丅屌桳抣夝愅偼丄尦偺懳徧峴楍偵嵗昗曄姺傪壗夞傕孞傝曉偟寁嶼傪偟偰丄懳妏慄埲奜偺梫慺偑侽偵嬤偯偔傛偆偵捈偟偰偄偔偙偲偱偡丅嵟弶偺懳徧峴楍傪T0=T偲偟丄k斣傔偺孞傝曉偟寁嶼偱摼傜傟偨懳徧峴楍傪Tk偲偟傑偡偲丄偦偺帪偺扨埵儀僋僩儖偺峴楍Ak偲偵壓偺娭學偑惉傝棫偪傑偡丅

丂寁嶼偺曽朄偼丄師偺傛偆偵偟傑偡丅弶婜抣偼丄T0=T丄A0=E 偱偡丅偙偙偱偺扨埵峴楍E偼丄懳妏慄梫慺偩偗偑偡傋偰侾丄懠偺梫慺偑偡傋偰0偺懳妏峴楍偱偡丅k斣傔偺峴楍Tk丄Ak偼丄k-1斣傔偺峴楍Tk-1丄Ak-1傪曗惓偡傞傛偆偵寁嶼偟傑偡丅偦偺曽朄偼丄Tk-1偺懳妏慄梫慺偺側偐偱丄傑偩0偱偼側偄梫慺冄ij=冄ji偩偗偵拲栚偟丄偦偺i斣傔偲j斣傔偺峴偲楍偲偱峔惉偡傞俀亊俀偺梫慺偵拲栚偟傑偡丅偦偟偰丄冄ij=冄ji=0偲側傞傛偆偵嵗昗儀僋僩儖ei偲ej偲傪夞揮偝偣傑偡丅偦偺夞揮峴楍傪Hk偲偟傑偡丅偙傟偼慜崁偺幃(4.69)偲杮幙揑偵摨偠張棟偱偡丅偡側傢偪孞傝曉偟寁嶼乮僀僥儗乕僔儑儞乯傪師偺傛偆偵峴偄傑偡丅

峴楍Hk偺惉暘偼丄扨埵峴楍偺曄宍偱偁偭偰丄i斣傔偲j斣傔偺峴偲楍偲偑壓偺傛偆偵側偭偰偄傑偡丅

婰崋偼C=cos兤丄S=sin兤偺堄枴偱偡丅峴楍Hk偼丄嵗昗幉偺儀僋僩儖偺偆偪丄ei偲ej偩偗傪壓偺傛偆偵夞揮偝偣傑偡丅

丂幃(4.74)偵傛偭偰丄Tk偺庡懳妏慄埲奜偺梫慺偑幚梡忋廫暘偵0偲側傞傑偱曗惓傪孞傝曉偟傑偡偲Tk偼丄屌桳抣偺暲傫偩懳妏峴楍偵廂懇偟丄Ak偑屌桳儀僋僩儖偺廤崌偲偟偰摼傜傟傑偡丅偙偺嵺丄屌桳儀僋僩儖偼丄偡傋偰屳偄偵捈岎偡傞扨埵儀僋僩儖偺忦審偑枮懌偝傟傑偡丅偙偺孞傝曉偟寁嶼偱偼丄偁傞旕懳妏梫慺冄ij傪0偵偡傞寁嶼傪峴偭偰傕丄暿偺孞傝曉偟寁嶼偱悢抣偑戙擖偝傟傞偙偲偑偁傝傑偡丅偦偺偨傔丄幚梡寁嶼偱偼丄戝偒側悢抣偺旕懳妏梫慺偐傜愭偵曗惓偟丄偡傋偰偺懳妏梫慺偑廫暘偵彫偝偔側偭偨偲偙傠偱寁嶼傪懪偪愗傝傑偡丅偙偺傾儖僑儕僘儉偱儔僀僽儔儕壔偝傟偨僾儘僌儔儉偱偼丄屌桳抣偺戝偒偄曽偐傜弴偵暲傋捈偟偰丄屌桳儀僋僩儖傕偙偺弴偵暲傋曄偊傞傕偺偑尒庴偗傜傟傑偡丅偦偆偡傞偲婔壗妛揑側堄媊偑幐傢傟偰偟傑偄傑偡偺偱丄棙梡偡傞偲偒偵偼拲堄偑昁梫偱偡丅
師偺儁乕僕