丂偁傞暯柺恾宍偺尨恾宍傪丄暿偺嶌夋椞堟偺巜掕偟偨応強偵幨偟偨偄偲峫偊傑偡丅偙偺偲偒偺暘偐傝傗偡偄巜帵曽朄偼丄尨恾傪埻傓巐曈宍偺榞A傪丄幨偡懁偺巐曈宍偺榞B偵妱傝晅偗傞傛偆偵偟偰尨恾慡懱傪怢傃弅傒偝偣傑偡丅幚慔揑側僨僓僀儞嶌嬈偱偼丄偦傟偧傟偺巐曈宍傪偝傜偵嵶偐偔儊僢僔儏偵嬫愗偭偰丄扨弮側恾宍扨埵偛偲偵尨恾偺嵶晹傪幨偟偰偄偒傑偡丅偙偺曽朄傪悢妛揑偵埖偆偙偲偑曄姺偱偡丅巐曈宍偺榞傗丄偦偺撪晹傪儊僢僔儏偵嬫愗傞偙偲偑嵗昗宯偺掕媊傪偟偰偄傞偙偲偵側傝傑偡丅
丂晛捠偵峴傢傟傞暯柺恾宍偺曄姺偼丄尨恾傪埻傓曽偺巐曈宍A傪惓曽宍傑偨偼嬮宍偲偟丄恾傪揬傝晅偗傞懁偺巐曈宍B傕憡帡偺恾宍傪峫偊傑偡丅尨恾懁偐傜尒傟偽丄恾偺揬傝偮偗偼幨偡懁偺椞堟傊偺暯峴堏摦丄奼戝傑偨偼弅彫丄夞揮丄応崌偵傛傞偲棤曉偟乮嬀憸乯側偳偺曄姺偑偝傟偨偙偲偵側傝傑偡丅尨恾宍傪憡帡偵幨偡偙偲偺懠偵丄尨恾宍偵曄宍傪壛偊偨偄偙偲偑偁傝傑偡丅偙偺曄宍偵偼擇庬椶偁偭偰丄偦偺摿挜偼師偺傛偆偵側傝傑偡丅
恾5.1丂暯柺恾宍偺庬乆偺曄姺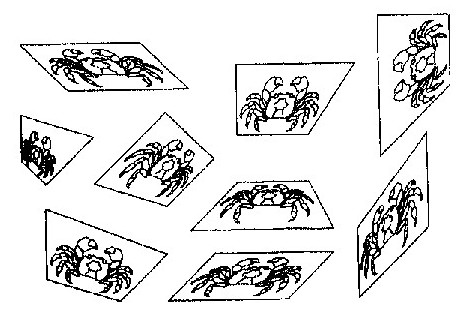
(1)惓曽宍偑堦斒揑側暯峴巐曈宍偵側傞曄宍丗
偙偺曄宍偼丄廲曽岦偲墶曽岦偲偱奼戝傑偨偼弅彫偺攞棪偑堎側傞曄姺偱偡丅椺偊偽丄惓曽宍偑嬮宍偵側傞傛偆側曄宍偱偡丅惓曽宍偑旽宍偵側傞曄宍偼丄惓曽宍偺擇偮偺懳妏慄曽岦偱奼戝傑偨偼弅彫偺攞棪偑堎側傞曄姺偱偡丅(2)憡懳偡傞擇曈偺暯峴惈偑側偔側傞曄宍丗
偙偺曄宍偼丄惓曽宍傪幬傔偺岦偒偐傜幨恀偵嶣偭偨偲偒偵摼傜傟傞恾宍偑戙昞揑側傕偺偱偡丅偙傟偑幩塭曄姺偱偡丅幩塭曄姺傪堦斒揑偵埖偆応崌偵偼丄幨恀偱摼傜傟偨恾宍偵懳偟偰丄偝傜偵忋偺(1)偺曄姺偑壛傢偭偰曄宍偝傟傑偡丅幩塭曄姺偼師偺5.3愡偱愢柧偟傑偡丅
丂傾僼傿儞曄姺偲偼丄恾宍傪曄宍偝偣側偄偱暯峴堏摦傗夞揮傪偝偣傞偙偲偵壛偊偰丄忋偺曄宍偺庬椶偺暘椶(1)傪崌傢偣偨曄姺偺憤徧偱偡丅恾宍偺嵍塃偑斀揮偡傞曄姺偼丄曄宍偺摿庩側応崌偱偁偭偰丄擇偮偺曽岦偺奼戝傑偨偼弅彫偺攞棪偑堦曽偱亄丄傕偆堦曽偱亅偺晞崋偵側偭偨応崌偵婲偙傝傑偡丅偙偺曄姺偺悢妛揑曽朄偼丄慜偺戞係復偱愢柧偟偨曄姺峴楍傪俀師尦恾宍偵墳梡偟偨傕偺偱偡丅幃(4.1)乣(4.3)偼壓偺傛偆偵娙扨偵側傝傑偡丅
宍幃揑偵壓偺傛偆側昞尰傕巊偄傑偡丅
偙偙偱尰傟傞俀亊俁偺嬮宍峴楍傪暯柺恾宍偺戙悢揑側堄枴偱偺曄姺峴楍偲尵偄傑偡丅婔壗妛揑偵偼丄曄姺偺庡梫晹暘偺俀亊俀偺惓曽峴楍偑夞揮偲曄宍偲傪張棟偟丄巆傝偑暯峴堏摦偺惉暘傪昞偟傑偡偺偱丄壓偺傛偆偵暘偗偰昞婰偟傑偡丅

偙偺幃傪丄婰崋傪巊偭偰壓偺傛偆側戙悢幃偱昞偟傑偡丅偙傟偼幃(4.3)偲摨偠偱偡偑拞恎偼俀師尦偺埖偄偱梡偄傑偡丅
丂嬶懱揑偵暯柺恾宍偺傾僼傿儞曄姺偺悢抣寁嶼傪偡傞偵偼丄師偺傛偆側庤懕偒偑昁梫偱偡丅傑偢尨恾偺奺揰傪昞偡偨傔偵嵗昗宯傪掕媊偟傑偡丅偙偺嵗昗宯傪巊偭偰丄尨恾傪埻傓巐曈宍榞A偺3捀揰偺嵗昗傪梌偊傑偡丅偙偺3揰偼丄巐曈宍偺嵍壓嬿丄塃壓丄嵍忋偱偡丅僨乕僞偲偟偰偼偙傟傜偺嵗昗6惉暘偱偡丅恾傪棟夝偟傗偡偔偡傞偨傔丄僨乕僞偲偟偰偼嵍壓嬿偺捀揰嵗昗乮埵抲儀僋僩儖乯偲丄巐曈宍偺榞偺岦偒傪帵偡傛偆偵丄偦偺捀揰傪婲揰偲偟偰塃壓偺捀揰傑偱偺儀僋僩儖丄摨偠偔嵍忋偺捀揰傑偱偺儀僋僩儖傪昤偒傑偡丅恾宍傪幨偡懁偵偮偄偰傕嶌恾椞堟偺嵗昗宯傪寛傔丄揬傝晅偗傞巐曈宍榞B傪寛傔傑偡丅偙偺僨乕僞傕尨恾偵懳墳偝偣偨嶰偮偺儀僋僩儖偱偡丅傾僼傿儞曄姺偱偼丄恾宍摨巑偺憡懳揑側埵抲偺懳墳偵3捀揰偺僨乕僞傪巊偄傑偡偺偱丄尨棟揑偵偼丄嶰妏宍傪嶰妏宍偵懳墳偝偣傞曄姺偱偡丅巐曈宍偺榞傪峫偊傞偺偼丄榞偺奜懁偵恾偑偼傒弌側偄傛偆偵偡傞偨傔偱偁偭偰丄僂僀儞僪僂偺榞偲摨條偵丄僌儔僼傿僢僋僗偺張棟偵偍偗傞僋儕僢僺儞僌斖埻傪寛傔傞僨乕僞偲偟偰傕棙梡偟傑偡丅
丂傾僼傿儞曄姺偼丄幃(5.2)偱巊傢傟傞6屄偺掕悢a1丄a2丄b1丄b2丄d1丄d2傪寛傔傟偽寁嶼偱偒傑偡丅戙悢妛偺栤戣偵偡傞偲丄擇慻偺巐曈宍榞偺偦傟偧傟6屄偺僨乕僞傪巊偭偰6尦楢棫1師曽掱幃傪棫偰偰夝偒傑偡丅偟偐偟丄婔壗偺栤戣偲偟偰偲傜偊傞偲丄傕偭偲僗儅乕僩偵傾僼傿儞曄姺傪峫偊傞偙偲偑偱偒傑偡丅偦傟偼丄師偺傛偆偵夝庍偟傑偡丅尨恾偺榞偺巐曈宍A傕丄幨偡懁偺巐曈宍B傕丄婎慴偲側傞僨乕僞偑摨偠偱偡丅偦傟偼悽奅嵗昗偺尨揰傪婲揰偲偟偨扨埵偺惓曽宍偱偁傞偲偟傑偡丅偙偺扨埵偺惓曽宍傪丄暿乆偵曄姺傪偟偰尨恾懁偲幨偡懁偲偺巐曈宍偵偟偨偲峫偊傑偡丅
丂巐曈宍偺僨乕僞偼暯柺恾宍偺俀亊俁偺曄姺峴楍M偺惉暘(a,b,d)偱偁傞傛偆偵惍棟偟偰峫偊傑偡丅偮傑傝丄d偑巐曈宍偺嵍壓嬿偺捀揰嵗昗偱丄a丄b偑擇曈偺岦偒偲挿偝偲傪梌偊傞儀僋僩儖偲偟傑偡丅擇慻偺巐曈宍偺僨乕僞傪婰崋MA丄MB偲偟傑偡丅傾僼傿儞曄姺M偼丄尨恾撪偵嵼傞揰偺嵗昗傪堦扷扨埵惓曽宍撪偺僨乕僞偵捈偟乮媡偺曄姺乯丄夵傔偰幨偡懁偺巐曈宍偺榞偺拞偵偍偲偟傑偡乮惓偺曄姺乯丅M偼嬮宍峴楍偱偡偺偱丄棟榑揑側堄枴偱偼媡峴楍傪掕媊偱偒傑偣傫偑丄婰崋幃傪巊偭偰奣擮揑偵偙偺曄姺傪昞尰偡傞偲壓偺傛偆偵昞偡偙偲偑偱偒傑偡丅
丂嬶懱揑側悢抣寁嶼偵巊偆昞尰偼戞係復偱愢柧偟傑偟偨偑丄偙偺奣擮揑側戙悢幃傪G-BASIC偱偼師偺傛偆偵彂偗偽傛偄傛偆偵愝寁偟偰偁傝傑偡丅
M=MB*REV(MA)
偙偙偵丄M,MA,MB偼丄2師尦偺曄姺峴楍偲偟偰慜傕偭偰愰尵偝傟偨曄悢婰崋偱丄惉暘悢偼6屄偱偡丅MA丄 MB偺拞恎偺僨乕僞偼LET暥偱戙擖偟傑偡丅REV偼G-BASIC偺慻傒崬傒娭悢偱丄堷偒悢偺撪梕傪偦偺宆偱媡偺宍幃偵曄姺偝偣傑偡丅堷偒悢偑曄姺峴楍偱偁傟偽丄偦偺曄姺峴楍偺媡曄姺峴楍偑媮傔傜傟傞傛偆偵側偭偰偄傑偡丅
丂暯柺恾宍偺傾僼傿儞曄姺偼丄婎杮揑偵偼揰偺嵗昗傪曄姺峴楍偱曄姺偝偣傞幃(5.1乯偱峴傢偣傑偡丅G-BASIC偺昞尰偱偼丄曄姺峴楍偵愊偺墘嶼巕傪偮偗偰丄曄姺偝偣偨偄婔壗梫慺傪塃偐傜墘嶼偝偣傟偽傛偄傛偆偵愝寁偟偰偁傝傑偡丅暯峴堏摦偲丄扨弮側奼戝傑偨偼弅彫偼丄傢偞傢偞曄姺峴楍傪媮傔偰墘嶼偝偣側偔偰傕丄扨弮偵儀僋僩儖偺壛嶼偲僗僇儔乕攞傪偡傟偽張棟偱偒傞傛偆偵側偭偰偄傑偡丅夞揮傪峴傢偣傞曄姺偲丄嬀憸曄姺偲偵偼丄慻傒崬傒娭悢MROT丄MIRR傪巊偄傑偡丅曄姺偝偣傞曽偺僨乕僞宆偱丄慄暘偼椉抂偺揰傪僨乕僞偺峔惉梫慺偵偟偰偁傝傑偡偺偱丄恾宍偺曄姺偵捈愙棙梡偡傞偙偲偑偱偒傑偡丅偟偐偟丄捈慄偺応崌偵偼丄捈慄忋偺擇揰傪曄姺偟偨屻偱丄僨乕僞傪昗弨偺僨乕僞峔憿偵捈偟傑偡丅俀師尦偺曄姺峴楍偺宆偼丄恾宍揑偵偼嵗昗幉傪昞偡2杮偺慄暘偱峔惉偝傟偰偄傑偡偺偱丄曄姺偑墘嶼偱偒傑偡丅墌丒嬮宍偺宆偼丄暯峴堏摦偲奼戝丒弅彫偑娽偵尒偊傞曄姺偲偟偰張棟墘嶼偝傟傑偡偑丄夞揮張棟偑柍岠偱寢壥偲偟偰奜愙恾宍偑摼傜傟傑偡丅
丂偡偱偵戞4復偱愢柧偟偨傛偆偵丄俁師尦乮棫懱乯恾宍偺奼戝丒弅彫丒夞揮丒曄宍丒堏摦側偳傪寁嶼偡傞偲偒丄曄姺峴楍偺宍偱峫偊傞偺偑曋棙偱偁傞偲偟偰丄庬乆偺桳梡側幃傪愢柧偟偰偍偒傑偟偨丅偦偺弌敪偲側偭偨幃偑(4.1)偱偡丅宍幃揑偵峴楍偺昞尰偵偟偨偺偑壓偺幃偱偡丅
偙偙偱昞傟傞俁亊係偺嬮宍峴楍偺偙偲傪戙悢揑側曄姺峴楍偲尵偄丄G-BASIC偱偼偙傟傪俁師尦偺曄姺峴楍偺堦偮偺僨乕僞宆偱埖偆傛偆偵偟偰偄傑偡丅俀師尦恾宍偺応崌丄偙偺嬮宍峴楍偵傛傞曄姺傪傾僼傿儞曄姺偲屇傇偺偱丄棫懱恾宍偺曄姺偺応崌傕傾僼傿儞曄姺偲屇傇偙偲偵偟傑偡丅
丂幚慔揑偵暯柺恾宍傪傾僼傿儞曄姺偝偣傞応崌偵偼丄尨恾宍偺暯峴巐曈宍榞傪丄幨偡応強偺暯峴巐曈宍榞偵乽浧傔崬傓乿偲偄偆張棟傪峫偊傑偟偨丅棫懱恾宍偺傾僼傿儞曄姺偱偼丄暯峴榋柺懱偐傜暯峴榋柺懱傊偺浧傔崬傒傪峫偊偰丄俁亊係峴楍偺12屄偺掕悢傪寛掕偟傑偡丅偙傟偼丄暯峴榋柺懱偺8偮偺捀揰偺拞丄4捀揰偺嵗昗偱峫偊傑偡丅偙傟偼丄堦偮偺捀揰嵗昗傪尨揰偲偟丄偦偙傪婲揰偲偟偨嶰曈偵偮偄偰丄岦偒偲挿偝偲傪梌偊傞嶰偮偺儀僋僩儖偲偱梌偊傑偡丅偙偺傛偆偵偟偰寛傔偨擇慻偺嬊強嵗昗宯傪僨乕僞偲偡傟偽丄棫懱恾宍偺傾僼傿儞曄姺偺曄姺峴楍M偼幃(5.4)偲慡偔摨偠傛偆偵寁嶼偡傞偙偲偑偱偒傑偡丅偨偩偟僨乕僞宆偼俁師尦偺曄姺峴楍偱掕媊偟偨曄悢偱偡丅
丂夞揮傪峴傢偣傞曄姺偺曄姺峴楍偼4.5愡偱夝愢偟傑偟偨丅偦偙偱摫偄偨岞幃傪棙梡偡傞偨傔丄慻傒崬傒娭悢TROT丄XROT偑弨旛偟偰偁傝傑偡丅傑偨丄嬀憸曄姺傪峴傢偣傞偨傔偵丄慻傒崬傒娭悢TMIRR偑弨旛偟偨偁傝傑偡丅曄姺偝偣傞曽偺僨乕僞宆偵偮偄偰尵偊偽丄椺偊偽丄柺偱偼丄柺忋偵嶰揰傪峫偊丄偦偺嶰揰傪曄姺偟丄偙偺嶰揰傪捠傞柺偵側傞傛偆偵僨乕僞宆偺昗弨壔偑撪晹揑偵峴傢傟傑偡丅
丂偙偙傑偱偺愢柧偼拪徾揑偱偟偨偺偱丄傗傗嬶懱揑側張棟偵偮偄偰夝愢偟傑偡丅偦傟偼CAD偵偍偄偰擇偮偺婔壗儌僨儖偑愙偡傞傛偆側堏摦傪偝偣偨偄丄偲偄偆忦審傪偳偆夝寛偡傞偐傪椺偲偟偰峫偊傞偙偲偵偟傑偡丅
丂傑偢暯柺恾宍偺応崌傪峫偊傑偡丅擇偮偺懡妏宍恾宍A丄B偑偁偭偰丄巜掕偟偨曈偱擇偮偺懡妏宍偑愙偡傞傛偆偵丄堦曽偺懡妏宍A傪曄宍偝偣側偄偱夞揮偲堏摦偲傪偝偣傞傛偆側曄姺峴楍傪媮傔偨偄偲峫偊傑偡丅偙偺応崌偺忦審偼丄夞揮偲堏摦傪偡傞懡妏宍A偺懁偲丄愙懕偡傞曽偺懡妏宍B偺懁偲偱摨偠挿偝偺曈傪峫偊丄偦偺曈偑廳側傞傛偆偵夞揮偲堏摦偲傪偝偣傑偡丅曈偺掕媊偼偦傟偧傟擇偮偺捀揰嵗昗偱峫偊傑偡丅偙偺忦審偼2師尦偺曄姺峴楍偺6惉暘偺拞丄巐偮偺忦審傪寛傔傞偙偲偱偡丅曄宍偟側偄偲偄偆忦審偑巆傝偺擇偮偺忦審傪梌偊傑偡丅
恾5.2丂暯柺恾宍偺愙懕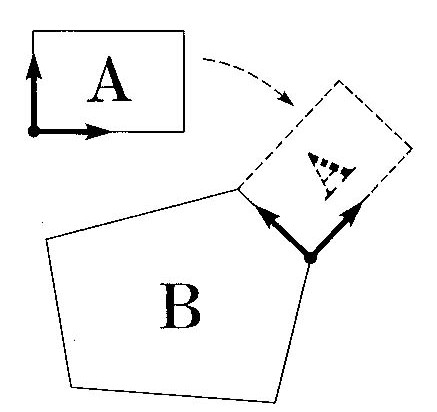
丂曄姺峴楍偑嵗昗宯傪掕媊偡傞宍幃偱傕偁傞偺偱丄愙懕偝偣偨偄擇偮偺懡妏宍儌僨儖A丄B偺拞偵偦傟偧傟巕偺嬊強嵗昗宯傪寛傔傑偡丅偦偺応強偼丄愙懕偝偣傞曈偲偟傑偡丅尨揰偺埵抲傪曈偺堦偮偺捀揰偺嵗昗偲偟傑偡丅堦偮偺嵗昗幉偺岦偒偲挿偝偲傪梌偊傞儀僋僩儖偼丄尨揰偐傜傕偆堦偮偺捀揰傊偲岦偔桳岦儀僋僩儖偲偟傑偡丅傕偆堦偮偺嵗昗幉傪梌偊傞儀僋僩儖偼嵟弶偺嵗昗幉傪掕媊偡傞儀僋僩儖偲捈岎偝偣丄摨偠挿偝偵寛傔傑偡丅偙偺傛偆偵偟偰寛傔偨擇慻偺嬊強嵗昗宯傪丄婰崋MA丄MB偲彂偔偙偲偵偟傑偡丅偙偙偱MA偼堏摦偝偣傞曽偺嵗昗宯丄MB偼堏摦愭偺曽偺嵗昗宯偲偟傑偡丅恾宍偺愙懕偼丄MA傪堏摦偝偣偰MB偵廳偹傞偙偲偱偡丅偙偆偟偰幃(5.4)傪巊偭偰曄姺峴楍傪媮傔偰丄儌僨儖A偺嵗昗傪曄姺偝偣傟偽丄巜掕偟偨曈傪夘偟偰擇偮偺儌僨儖偑愙偟傑偡丅
丂棫懱恾宍偺応崌丄擇偮偺懡柺懱偺巜掕偟偨柺偱擇偮偺懡柺懱A丄B偑愙偡傞傛偆偵堦曽偺懡柺懱A傪曄宍偝偣側偄偱堏摦偝偣傞傛偆側曄姺峴楍傪媮傔傞偙偲傪峫偊傑偡丅愙怗偝偣傞擇偮偺柺傪巜掕偡傞偵偼丄偦傟偧傟偺柺傪昞偳偆偟偱僺僢僞儕崌傢偣傞傛偆偵丄嬀偵幨偣偽崌摨偵側傞傛偆偵丄堦曽偺嶰妏宍偼棤岦偒偵峫偊傑偡丅擇偮偺嶰妏宍偑廳側傞傛偆偵堦曽偺懡柺懱A偵夞揮偲堏摦偲傪偝偣傑偡丅俁師尦偺曄姺峴楍偺12惉暘偺偆偪丄嬨偮傪寛傔傞忦審偑偙偺嶰妏宍偺嶰揰偺嵗昗偱偡丅嶰妏宍偺堦偮偺捀揰傪尨揰偲偟丄偦偺尨揰傪婲揰偲偟偨擇曈傪擇偮偺嵗昗幉偵偟傑偡丅傕偆堦偮偺嵗昗幉偼丄愭偺擇偮偺嵗昗幉偲捈岎偝偣傞傛偆偵儀僋僩儖愊偱媮傔傑偡丅曄姺峴楍傪峫偊傞偲偒偺峫偊曽偼丄暯柺恾宍偺愙懕偺応崌偲杮幙揑偵摨偠曽朄偱偡丅愙懕傪峫偊傞柺偵崌摨側嬊強嵗昗宯傪掕媊偡傞偙偲偵曄偊傟偽丄幃(5.4)偑偦偺傑傑墳梡偱偒傑偡丅
丂堦斒揑偵恾宍傪愙懕偝偣傞偲偒偺忦審偼丄憃曽偺愙懕偝偣傞応強偵揬儕崌傢偣梡偺恾宍傪峫偊丄偦偺擇偮傪廳偹崌傢偣傞偙偲偱偡丅偙偺恾宍偺掕媊偵丄巕偺嬊強嵗昗宯傪峫偊傑偡丅偙偺応崌偺嬊強嵗昗宯偼丄昁偢偟傕悽奅嵗昗宯偺僐僺乕偺忦審偵側偭偰偄側偔偰傕峔偄傑偣傫丅嵗昗幉偺挿偝偑堎側偭偰偄偰傕丄傑偨幬岎嵗昗偱傕傛偄偺偱偡丅偝傜偵堦斒揑側応崌丄廳偹崌傢偣傞嶰妏宍偑崌摨偱側偄応崌偵奼挘偟偰傕峔偄傑偣傫丅偙偺偲偒丄堏摦偝偣傞懁偺恾宍偼堦斒揑側暯峴榋柺懱偵曄宍偡傞曄姺傪娷傒傑偡丅
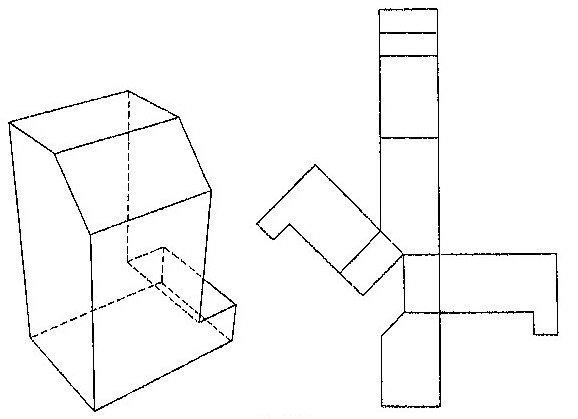
丂僒僀僐儘偺傛偆偵慡懱偺峔憿偑暯柺偱峔惉偝傟偰偄傞棫懱恾宍偱偼丄柺偛偲偵屌桳偺暯柺恾宍偑彂偒崬傑傟傞偙偲偑偁傝傑偡丅偙偺棫懱恾宍傪摟帇恾偵昤偒丄尒偊偰偄傞柺偵昤偄偰偁傞恾宍傪摟帇曄姺偟偨偄偲峫偊傑偡丅偙傟偼丄暯柺恾宍傪丄堦扷俁師尦偺暯柺偵揬傝偙傫偱丄偦偺俁師尦偺恾宍僨乕僞偐傜摟帇曄姺傪偝偣傞偲偄偆擇搙偺曄姺偱張棟偡傞偙偲偑偱偒傑偡丅偙偺嵟弶偺曄姺偑丄偙偙偱愢柧偡傞曄姺偱偡丅
丂暯柺恾宍傪峫偊傞応崌丄偙偺暯柺恾宍傪埻傓嬮宍偺椞堟傪峫偊傑偡丅懡柺懱偺柺偵偮偄偰傕嬮宍偺椞堟傪掕媊偟傑偡丅暯柺恾宍偺曽偺嵗昗宯偵(x,y)嵗昗傪巊偭偰偄傞偲偟偨応崌丄偙偺嵗昗柺偵悅捈側z嵗昗幉傪僟儈乕偲偟偰壛偊偙偺嬮宍偺掕媊傪俁師尦偺嵗昗掕媊偺峴楍偵捈偟傑偡丅懡柺懱偺懁偱偺嬮宍椞堟偺掕媊偼丄慜愡偲摨偠偱偡丅恾宍揬傝偙傒偺曄姺峴楍偼幃(5.4)傪巊偄傑偡丅偨偩偟曄姺偺僨乕僞傪梌偊傞偲偒丄暯柺恾宍偺僨乕僞偼(x,y)嵗昗偩偗傪巊偄丄z幉偺抣傪忢偵0偲戙擖偟傑偡丅
恾5.3丂暯柺恾宍偺棫懱恾宍傊偺揬傝偙傒
僒僀僐儘傪椺偵忋偘傑偡偲丄揥奐恾偲偄偆偺偼丄懡柺懱偺奺柺偛偲偺惓搳塭傪愙懕曈偱弴偵宷偄偩恾宍偱偡丅偙偺張棟偼丄奺柺偺惓搳塭傪媮傔傞曄姺偵懕偗偰丄擇偮偺椬愙偟偨柺傪曈偱宷偖張棟偲偺擇偮偐傜惉傝棫偭偰偄傑偡丅棫懱揑側僨乕僞傪帩偭偨懡柺懱偺柺偺幚宍傪媮傔傞偵偼丄懳徾偲偡傞柺偵悅捈側帇慄傪帩偮傛偆偵帇揰嵗昗宯傊偺嵗昗曄姺傪偟側偗傟偽側傝傑偣傫丅搳塭恾偼丄嵗昗曄姺傪偟偨忋偱丄墱峴偒曽岦偺僨乕僞傪幪偰偰俀師尦偺恾宍僨乕僞偵捈偟偨傕偺偱偡丅偙偺曄姺偱偼丄摼傜傟傞搳塭恾偺岦偒傪偳偆寛傔傞偐偑擸傑偟偄栤戣偵側傝傑偡丅僒僀僐儘偺傛偆側榋柺懱偺揥奐恾偺昗弨揑側搳塭恾偺攝抲偼晬榐C偵帵偟傑偟偨丅僒僀僐儘傪婘偺忋偵抲偔抲偒曽偼24捠傝偁傝傑偡偺偱丄偦傟偧傟偵偮偄偰丄夞揮傪梌偊傞俁亊俁偺峴楍偑傒側堎側偭偰偄傑偡丅揔愗側夞揮峴楍傪慖傇偺偼恖娫偺姶惈偵傛傞敾抐偑昁梫偱偡丅
恾5.4丂揥奐恾