F.1 透視図の基本式
前のページ
;
次のページ
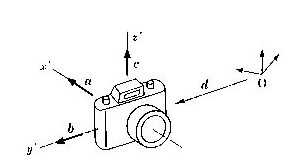
(1) カメラ座標系:
(2)世界座標系(x,y,z)の中でのカメラの位置:
d
=(
d
1
,
d
2
,
d
3
)
(3)カメラの回転角度:
(4)カメラの座標軸の向き:
(5)透視変換(カメラ座標系で見た対象物の世界座標):
図F.1 カメラ座標系
次のページ